- Sample Return from Moon & Mars
-
- 研究背景
- 2014年9月,月面における有人探査計画が発表され(露),また,火星探査機であるMaven (米),Mangalyaan (印)が相次いで火星周回軌道に到着する等,月・火星探査という目標に向け,世界各国で技術競争が繰り広げられています.その探査活動において重要とされてきた課題が,「地表面の試料採取」であり,現在火星上で探査活動を行っているCuriosity(米)には,ドリルやスコップを用いる掘削方式が採用されました.しかし,その動作機構は複雑であり,故障に陥りやすいという問題点があります.この点を考慮し,私たちは,振動と磁気力を組み合わせ,単純で信頼性の高い試料採取システムを開発しています.そして,火星探査という目標に対し,日本を代表するアプローチができることを目標としています.
火星探査ローバ:Curiosity - 研究内容
- 私たちが開発している試料の回収システムは,「磁気力による粒子の捕捉」および,「振動による粒子の搬送」によって構成されます.パイプの先端から侵入した模擬砂が,パイプの内部を伝って回収容器まで移動します.
「磁気力による粒子の捕捉」
パイプ先端にコイルを巻き.電流を流すことで磁界を発生させます.生じた磁界により土壌に含まれる磁性体を飛翔させ,コイル内に取り込みます.コイルに定常的な電流を流した場合,試料を引き寄せることが可能ですが,コイル内部にとどまってしまい,搬送することができません.そのため,コイルにパルス状の電流を流すことで,試料に搬送方向と逆向きの力が作用する前に磁界を消去します.これにより,コイル内部に取り込まれた試料をパイプ内部に導入することが可能になります.
「振動による粒子の搬送」
振動搬送の原理は工場の生産ラインで広く用いられている振動フィーダと同じです.振動装置が振動することによってコイルによって引き寄せられパイプに入った粒子は,回収容器の方向へと搬送されます.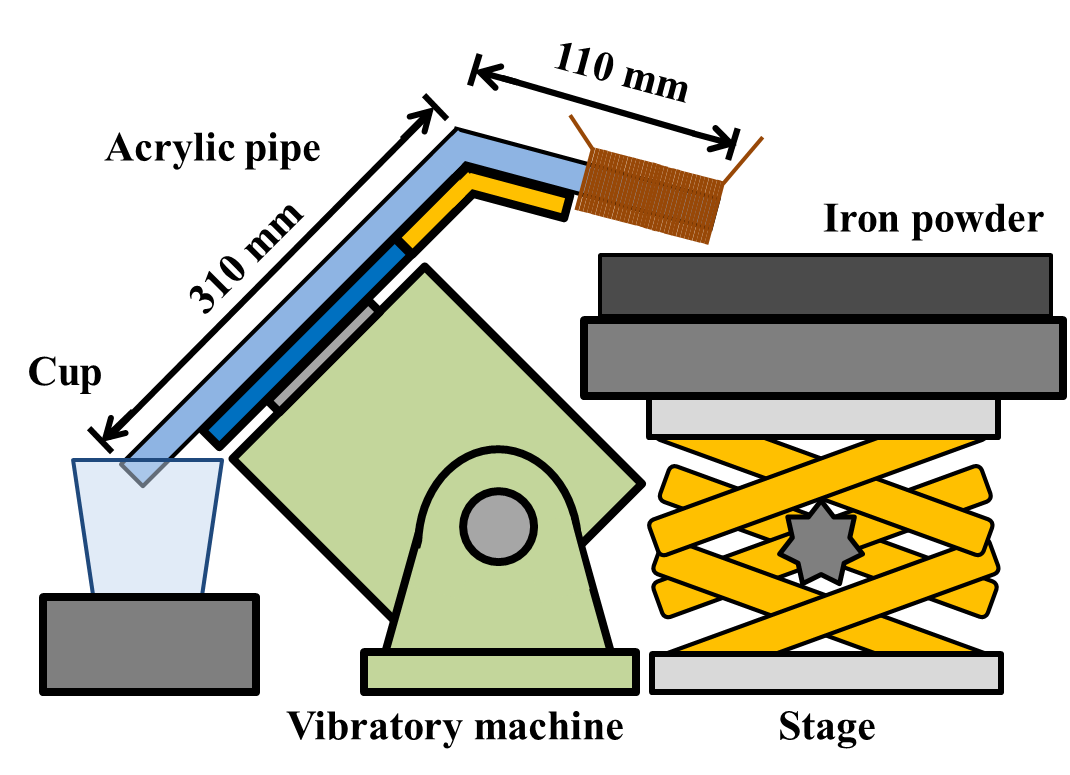
試料回収システム
(左)磁気補足の様子 (右)コイルガンの応用例 - 今後の展望
- これまでに,地上環境下と真空下で粒子の回収実験を行い,システムが有効に機能することを確認できました.そのため,次のステップとして,システムをシミュレーション上で再現し,月・火星環境下における粒子挙動の解明を目標としています.
- 研究概要書