- 研究内容
- 近年,医療・工業分野において急速な小型化が進んでいる電子部品や機械部品の実装・組み立てに際して,粒子を1粒ずつ取り扱うなど,微小粒子を対象としたハンドリング技術が必要とされている.静電気力を利用したマニピュレータは粒子を捕捉する際に機械的可動部を必要としないため,粒子を傷つける恐れが少なく,電気的に吸引力を制御できるという利点がある.そこで,マニピュレータ班では微小な粒子を一粒ずつ操作できる静電マニピュレータの開発を目指す.以下に今まで行ってきた研究の一例を示す.
- ■ 実 験
- 直径50 umの針を電界研磨によって先端数マイクロに加工し,絶縁コーティングを施す.作成したプローブを図1のように電極につなぎXYZステージによって操作できるように設置する.
プローブに電圧を印加するとプローブの先端に電界が発生し,分極による静電力を利用して粒子を捕捉することができる.さらに,印加電圧の符号を逆にすることで,粒子を分離することができる.これにより,大きさ数マイクロの粒子を操作することが可能となる.昨年度は30 um程度の粒径粒子を対象に実験を行ってきた.本年度は装置を小型化することによって数マイクロの粒径粒子の捕捉・分離に成功した.実際の画像を図2に示す.
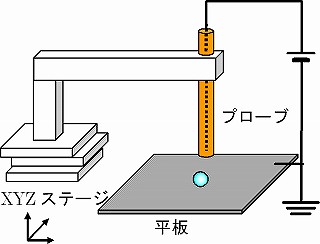
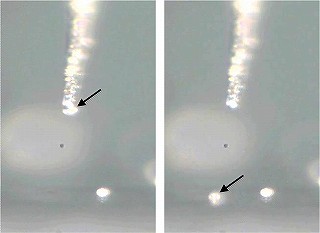
図1 同軸型プローブ実験装置 図2 ガラスの粒径粒子の捕捉時と分離後(粒径5 um
動画ダウンロード(wmv形式 815 KB)
- ■計 算
-
粒子には,重力,静電力,付着力が働いている.それぞれの力を考えることによって最適な装置の作成を目指す.計算では,粒子付近の電界を求め粒子の分極とそこから得る静電力を求めた.図3は針電極に1
Vを印加したときの電界である.そこから,静電力も求めることができた.
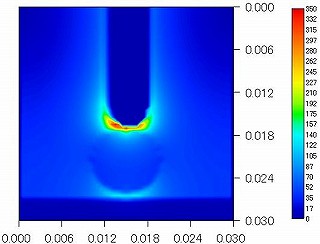
図3 粒子付近の電界(プローブに電圧1 V印加)
- ■今 後
-
操作目的としている粒子は,月の砂であり形がいびつなことから粒径粒子に比べて操作が困難であると考えられる。粒径粒子で基礎特性を把握し,装置を月砂の捕捉・分離に適したものに改良していく.